研究成果,および研究室所属の学部生による実習制作作品に関する動画を Youtube で公開しています.各画像をクリックすると Youtube で動画を再生します.
3次元センシング技術 画像センシング技術 ヒューマンセンシング技術 その他の動画
2009年度 2010年度 2011年度 2012年度 2013年度
2014年度 2015年度 2016年度 2017年度 2018年度
2019年度 2020年度 2021年度
新着動画
| CEATEC2024 2D画像センシング |
CEATEC2024 3D物体認識・ロボット |
CEATEC2024 ヒューマンセンシング |
 |
 |
 |
| CEATEC2024で展示した2D画像センシングに関する研究成果の紹介動画です. | CEATEC2024で展示した3D物体認識・ロボットに関する研究成果の紹介動画です. | CEATEC2024で展示したヒューマンセンシングに関する研究成果の紹介動画です. |
研究成果デモ動画
橋本・秋月研究室では,3次元センシング,画像センシング,ヒューマンセンシングの3つの研究領域において,先進的かつ実用的な研究を行っています.
ここでは,学会発表等で紹介したデモや実験に関する動画を公開しています.
3次元センシング技術
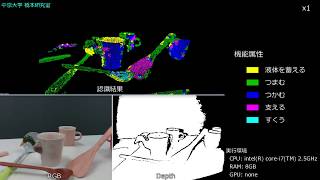
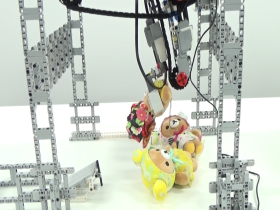
| 深層学習による「機能認識」を応用した お茶会ロボット (NEDOプロジェクト成果) |
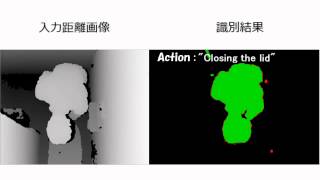
NEDOリアルタイム機能属性認識 |
機能属性認識と一般物体認識を利用した 生活支援ロボットのプロトタイプ (NEDOプロジェクト成果) |
Global Reference Frame によるリアルタイム 6DoF 認識 |
 |
 |
 |
 |
| 深層学習を使って,対象物の各部位のカタチから「Contain」「Grasp」などの機能情報を抽出し,これらをもとにして,ロボットが何をどうすべきか,自律的にタスクを生成し,実行します. |
日用品のリアルタイム「機能属性」認識技術です. |
「コップにジュースをいれて持ってきて」のような人の音声指令を理解して動作する.生活支援ロボットのプロトシステムを作成しました. |
平面的な見え方の物体に有効な3DオリエンテーションであるGRFを考案し,6自由度姿勢追跡に応用しました. 【表彰】IMEC2014 優秀講演賞 |
| 可観測性を考慮したベクトルペアによる 3次元位置姿勢認識と部品マッピング |
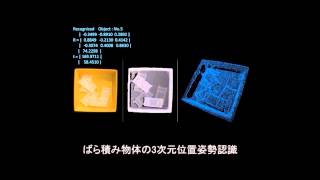
ばら積み部品の自動認識システム | 最適ベクトルペアを用いた物体認識 |
 |
 |
 |
|
シーン中で安定的に観測可能であることと,特徴ベクトルの独自性が高いことを条件として選択した3次元特徴点を用いて物体の位置姿勢を認識します. |
ばら積み物体の位置姿勢を高信頼かつ高速に推定し,ピッキングするシステムを開発しました. |
ばら積みシーンの生成学習による高信頼な3次元物体認識です.認識した対象物をオレンジ色で表示しています. |
画像センシング技術
| 周辺類似物との識別性能が高い テンプレートマッチング |
照明変動に頑健なテンプレートマッチング |
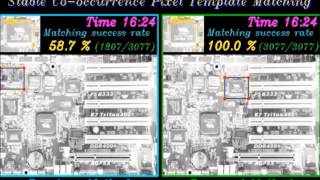
画像間共起確率に基づく 照明変動に強い物体検出 |
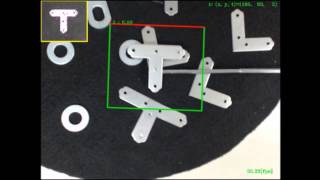
画素ペア学習を用いた 部品認識システム |
 |
 |
 |
 |
| DPTMのリアルタイムデモを,画像センシングシンポジウム(SSII2013)にて展示しました. 【表彰】DIA2012 研究奨励賞 他1件 |
SCPTMのリアルタイムデモを,画像センシングシンポジウム(SSII2013)にて展示しました. |
画素の時間的安定性を考慮したマッチング手法(SCPTM)を大きな照明変動が含まれる画像群に適用しました. |
周辺物との識別性能を考慮した画素選択型テンプレートマッチング(DPTM)です. |
|
サブトラッカの最適配置に基づく |
濃度共起確率に基づくユニーク画素を用いた |
 |
 |
|
最適選択されたサブトラッカ群を用いた,オクルージョンに強い物体追跡です.青枠がサブトラッカです. |
テンプレート画像を分析して,マッチングに使用する画素数を大幅に削減します.従来手法の100〜1000倍程度の高速化が可能です. |
ヒューマンセンシング技術
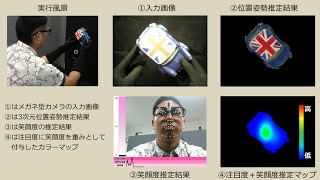
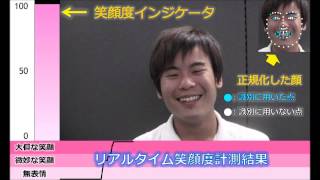
| 満足度推定のための 注目度・笑顔度センシングシステム |
ユーザーの感性を反映した |
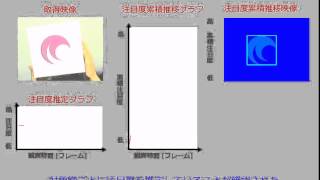
一人称視点カメラを用いた 対象物に対するユーザの注目度推定手法 |
トイレ空間における 人間の非定常動作検出 |
 |
 |
 |
 |
| メガネ型カメラを用いた対象物に対する注目度と,固定カメラを用いた対象物を観測している時の笑顔度を推定する手法を開発した. |
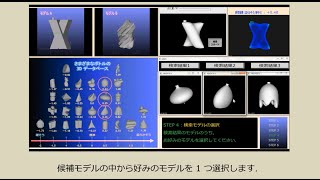
物体に対する感性指標を自動で推定する手法を用いて,3次元物体モデルの検索システムおよび形状を修正するシステムを試作した. |
一人称視点カメラから取得した動画を分析し,対象物に対するユーザーの注目度を推定します. |
トイレ空間内における人間の動作を高信頼に識別することにより,非定常な動作(うずくまり動作)を自動で検出します. |
| 顔キーポイント特徴の 移動方向コードに基づく 個人依存しにくい喜び表情識別 |
組み立て作業における |
ピアノ演奏の誤り提示システム (J. S. Bach, Menuet) |
生産ラインの組み立て作業における 手の動作自動記録システム |
 |
 |
 |
 |
| 顔キーポイントに移動ベクトルの方向と大きさをコード化(抽象化)することによって,個人依存しにくい表情識別を実現した. |
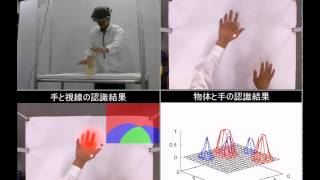
モノの組み立て作業において手動作と視線情報を自動記録するシステムです. |
運指認識と音列照合の2つの要素技術を組み合わせた誤り検出に基づく演奏支援システムです. |
3つのシーンごとに動作を記録した結果です.作業時間に着目しながら動作のプロセスを確認できます. |
| ロボット安全のための アンビエントセンシング |
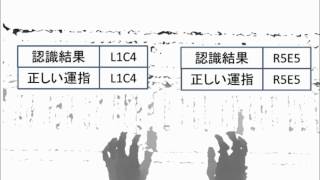
運指とミスタッチを検出できる |
3-Dハンドモデルを用いた マーカレス・ピアノ運指認識 (J. S. Bach, Prelude) |
3-Dハンドモデルを用いた オンライン画像生成に基づく 仮説検証型ピアノ運指認識 (メリーさんのひつじ) |
 |
 |
 |
 |
| 多数の小型距離センサ群の出力を分析して室内の人物存在位置を推定します.右側は存在位置に対応したセル番号です. |
マーカレス運指認識技術と音列照合技術を組み合わせた,スキル評価システムのプロトタイプです. |
汎用3-Dハンドモデルを用いるので演奏者によらず認識可能です. |
3-Dハンドモデルを用いたピアノ運指認識手法の実験結果です.鍵盤の青色が認識成功を示しています. |
| 距離画像シーケンスの分析に基づく ピアノ演奏における運指の自動認識 (J. S. Bach, Menuet) |
距離画像シーケンスの分析に基づく |
 |
 |
| 学習型ピアノ運指認識手法を,バッハ「メヌエット」に適用した.青枠は認識成功,赤枠は失敗を示しています. |
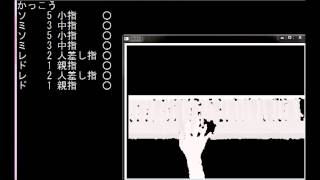
ボトムアップ型運指認識手法を「かっこう」に適用してみました.◯印は認識成功,×印は失敗を示しています. |
その他の動画
| 橋本研究室1分間紹介(物体検出技術) |
 |
| 中京大学橋本研における物体検出に関する研究成果です.ロボットセンシングに関する技術を3種類ご紹介します. |
| CEATEC2024 2D画像センシング |
CEATEC2024 3D物体認識・ロボット |
CEATEC2024 ヒューマンセンシング |
|
|
|
| CEATEC2024で展示した2D画像センシングに関する研究成果の紹介動画です. | CEATEC2024で展示した3D物体認識・ロボットに関する研究成果の紹介動画です. | CEATEC2024で展示したヒューマンセンシングに関する研究成果の紹介動画です. |
学部生による実習制作作品
橋本・秋月研究室では,研究室に配属された学部生に対して,ロボット制御や画像処理,情報処理全般に関する 基礎および応用教育を実施しています.ここでは,学部生(主に2年生)が実習授業で制作した数々の作品 を公開しています.
|
特徴点を用いた |
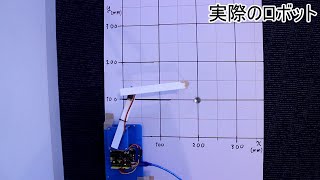
LiDARを用いた 自立移動ロボットによる迷路の攻略 |
内部コードと自動仮想アーキテクチャを 用いたインタプリタ型の 新コンピュータ言語の開発 |
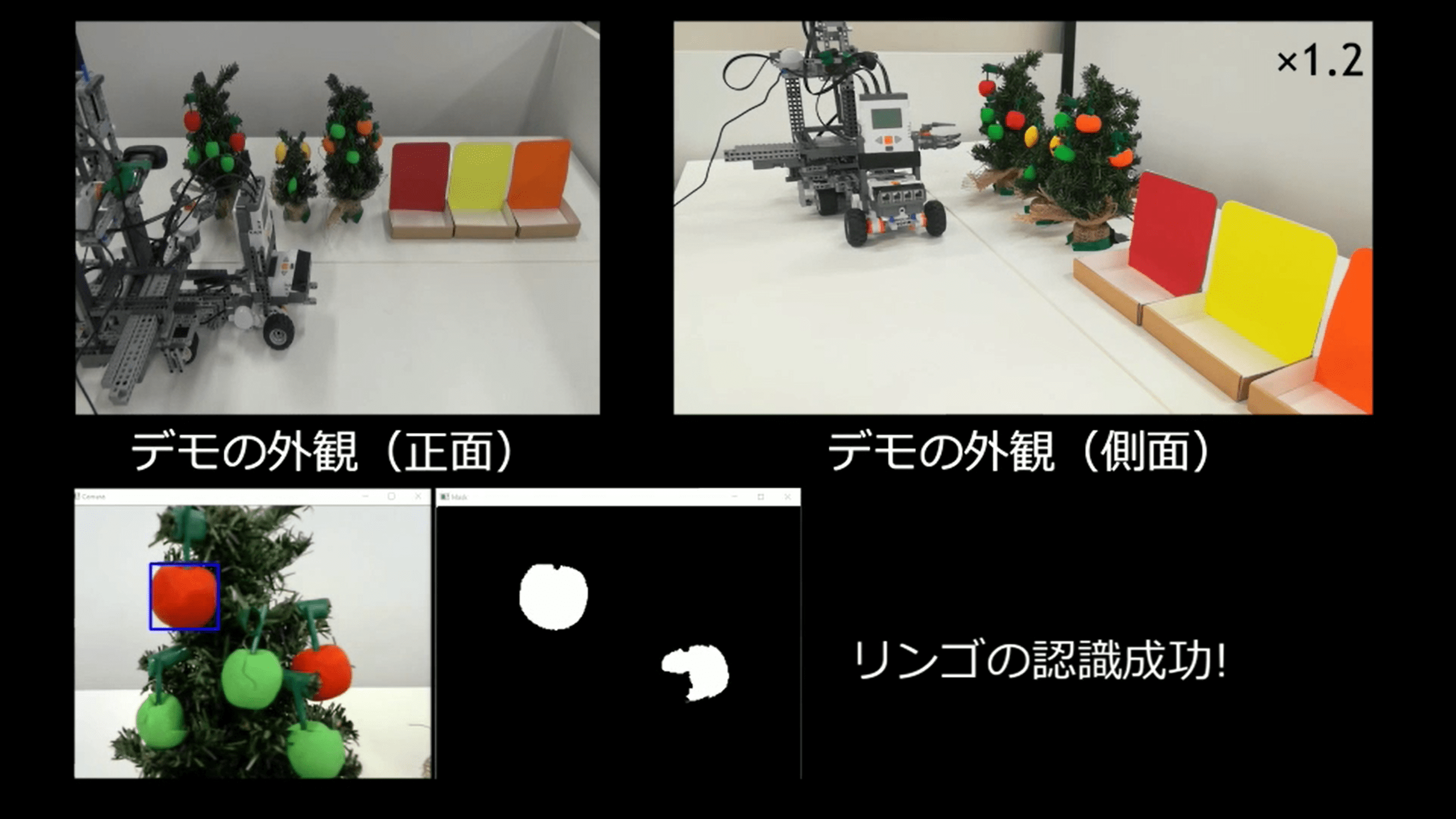
フルーツの種類分類システム |
-300x169.jpg) |
-300x169.png) |
-300x201.png) |
-300x169.jpg) |
| 特徴点を用いることで,散らばったジグソーパズルのピースを見本と対応付けるシステムを開発しました. | 自立移動ロボットが,LiDARを用いて迷路の地図を作成し,攻略するシステムを開発しました. | 最適化された内部コードに変換し,仮想化されたレジスタとメモリによって演算・実行するインタプリタ型の新コンピュータ言語を開発しました. | 撮影されたフルーツについて,k近傍法に基づいて識別し,名前を出力するシステムを開発しました. |
| Unityを用いたボールの順番推理ゲーム | 動画が映えルンです | モーションセンサを用いた 歩きスマホ注意システムの開発 |
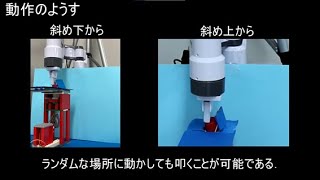
逆運動学を用いて ボタンを押すロボットの開発 |
-300x169.jpg) |
-300x169.png) |
-300x169.jpg) |
-300x169.png) |
| Hit&Blowのゲームシステムをプログラミングし,Unityでボールの配置等を表現しました. | カメラから動画を取得し,リアルタイムで動画を編集するシステムを開発しました. | 3DセンサのKinectによって取得した人間の姿勢から,歩きスマホを検出するシステムを開発しました. | 3軸2リンクの逆運動学を用いて,9個のボタンを正確に押すことができるロボットの開発しました. |
| 画像処理GUIの作成 | ダイクストラ法を用いた電車の 乗換案内システムの開発 |
Leap Motionを用いた楽器演奏システム | 主成分分析を用いた ジェンガ組み立てシステムの開発 |
-300x188.png) |
-300x169.png) |
-300x169.png) |
-300x167.png) |
| オブジェクト除去や短形抽出ができる新しい画像処理GUIを開発しました. | ユーザが出発点,目的地,時刻を入力することで,目的地までの乗換案内を出力するシステムを開発しました. | 「Leap Motion」という手を認識するセンサを用いて,仮想空間内で楽器演奏するシステムを制作しました. | 主成分分析を用いたジェンガ組み立てシステムを開発いたしました. |
2020年度
| 仮想空間における 3Dテトリスの開発 |
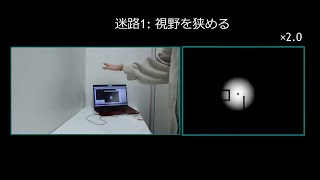
Leap Motionを用いた 指先の操作で進む迷路ゲームの開発 |
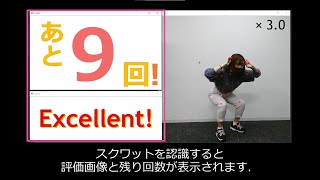
モーションセンサを用いた ポーズ評価システムの開発 |
動物の視界再現システムの開発 |
 |
 |
 |
 |
| 従来2Dゲームであるテトリスを,3Dゲームとして遊べるよう3Dテトリスの開発をしました. | センサを用いて人差し指先端の3次元座標を取得し,指先の操作で進む迷路ゲームを開発いたしました. | 3Dセンサ Kinectを用いて,人間の骨格を検出しスクワットを採点するシステムを開発しました. | カメラから画像を取得し,サメ,ネズミ,ネコ,カエルの視界を再現して PC のディスプレイに表示しました. |
| 色認識を用いた マスクの装着チェックシステムの開発 |
全自動モグラたたき | 迷路自動生成&探索システム | 2自由度ロボットアームの作成 |
 |
 |
 |
 |
| カメラで取得した画像をHSV変換して認識したい色を抽出し,抽出した色の割合を用いてマスクの位置を判定するシステムを開発しました. | Arduinoと感圧センサとサーボモータを用いたもぐらと,色認識を用いたアームロボットによる,もぐらたたきシステムを開発しました. | 自動で迷路を生成し,スタートからゴールまでの最短経路を求めるシステムを開発しました. | 逆運動学を用いて任意の位置に手先を動かすことのできる2自由度ロボットアームを制作しました. |
| テンプレートマッチングを用いた アームロボットによる 物体仕分けシステムの開発 |
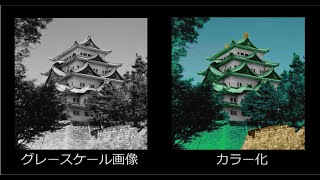
色と輪郭の情報提示を用いた カラー画像復元システム |
音声認識による スイカの収穫ロボットの開発 |
YOLOを用いた スキュタレー暗号解読システム |
 |
 |
 |
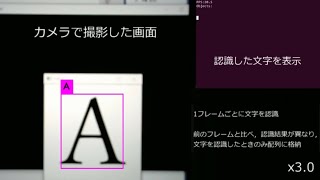 |
| テンプレートマッチングを用いて物体を認識し,認識した物体を仕分けするシステムを開発いたしました. | ユーザがグレースケール画像に色と輪郭を書き込むことで,カラー画像に復元するシステムを開発しました. | ユーザーの音声を認識し,スイカを収穫するロボットを開発しました. | スキュタレー暗号を作成し 1 文字ずつ表示するシステムと,表示された文字を YOLO で認識し暗号を解読するシステムを作成しました. |
2019年度
| アームロボットによる 扉の開扉システムの開発 |
Kinectを用いた ジェスチャー認識によるラジコン制御 |
Leap Motionを用いた 物体変形システム |
色認識を用いた 神経衰弱ゲームの開発 |
 |
 |
 |
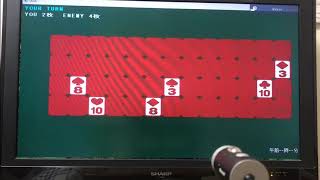 |
| 扉の取手の座標を認識し,逆運動学を用いて扉を開けるシステムを開発しました. | 3DセンサKinectを用いて,ジェスチャーを認識し,ラジコンを制御しました. | センサで取得した指先の座標からモデルを変形し,3Dプリンタで出力するシステムを開発しました. | 色認識を用いて指先のマーカーの座標を読み取り,ディスプレイ上で神経衰弱ができるシステムを開発しました. |
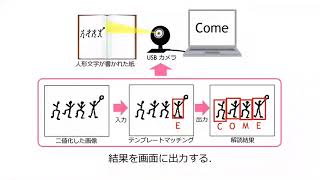
| テンプレートマッチングを用いた 人形暗号自動解読システム |
アームロボットによる ポケモン自動捕獲システム |
インタラクティブな錯視映像による 3Dディスプレイ |
ロボットを用いた 弁当の盛り付けシステムの開発 |
 |
 |
 |
 |
| 紙に書かれた人形暗号をテンプレートマッチングを用いて認識し,解読結果をアルファベットで表示するシステムを開発しました. | ゲーム画面上のポケモンの種類を認識し,珍しい色のポケモンを自動的に捕獲するシステムを開発しました. | ペッパーズゴースト錯視の原理を応用して,アクリルピラミッド内に音声に反応して動く3Dモデルを作成しました. | ロボットが弁当箱に盛り付けるおかずの種類,位置,姿勢を認識し,盛り付けるシステムを開発しました. |
| OpenCVを用いた 非接触型通信システム |
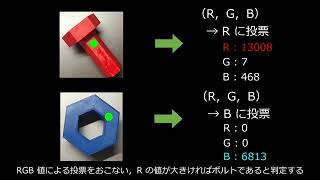
色識別によるボルトとナットの自動仕分け システムの開発 |
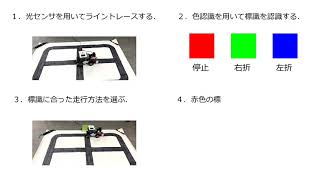
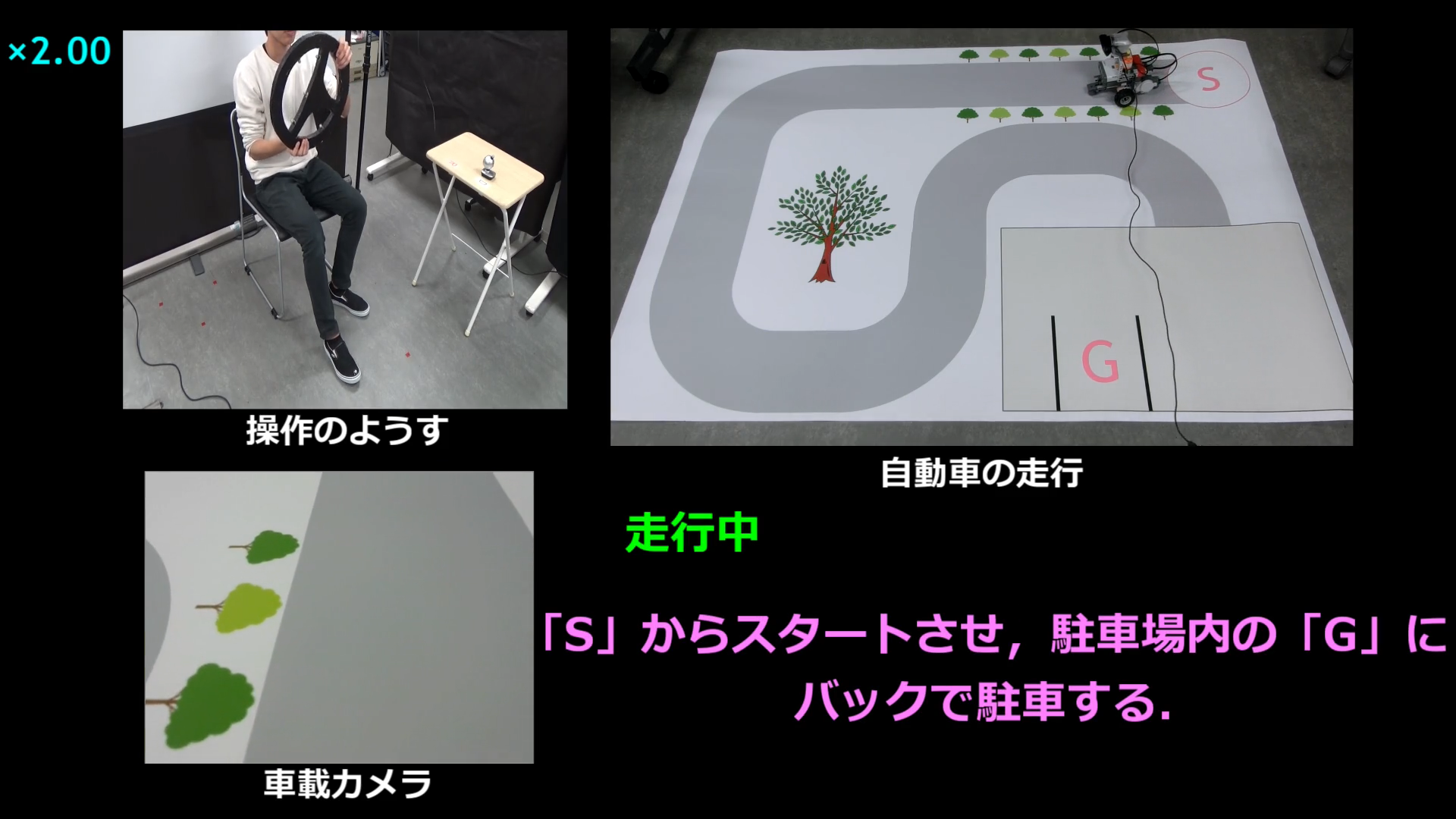
走行ルールに基づく 自動走行車の開発 |
Deep Learningを用いた キャラクタ認識システム |
 |
 |
 |
 |
| 送信側PCに入力された文字列を画像に変換し,受信側PCのUSBカメラを用いて取得した画像から文字列を得るシステムを開発しました. | ボルトとナットの位置姿勢を認識し,ロボットアームJACOを用いて対応するトレーに各部品を運搬するシステムを開発しました. | 色情報を用いて標識を認識し,認識結果にもとづいてロボットが自動走行するシステムを開発しました. | 3DグラフィックのゲームキャラクタをYOLO(Deep Learning)で認識して,警告音を鳴らすシステムを開発しました. |
2018年度
| 音声認識結果に基づくUR3を用いた 食事支援ロボット |
モーションキャプチャを用いた 動作奇跡の認識による 3D物体造形システム |
キーポイントマッチングおよび色認識による |
 |
 |
 |
|
音声により指示された食品を色認識し,食事支援をおこなうロボットシステムを開発しました. |
ユーザが空間内で動かしたペンの立体的な動きを認識し,描かれた形を3Dプリンタで再現するシステムを開発しました. |
書類に印刷された押印欄の種類や位置姿勢を認識し,自動押印ロボットを開発しました. |
| YOLOを用いた 高難度なフラッシュ暗算の 自動解答システム |
Kinectを用いた 骨格推定による 居眠り監視システム |
音声認識と色認識を用いた果実自動収穫システム |
 |
 |
 |
|
次々と画面に高速表示される数字をカメラで撮影し,ディープラーニングによって認識する,フラッシュ暗算解答システムを開発しました. |
3Dセンサで取得した人の動き情報をもとに居眠り動作を検知し,自動的に起こすロボットを開発しました. |
ユーザが音声により指定した果実を,色情報を用いて認識し,自動で収穫するロボットを開発しました. |
2017年度
|
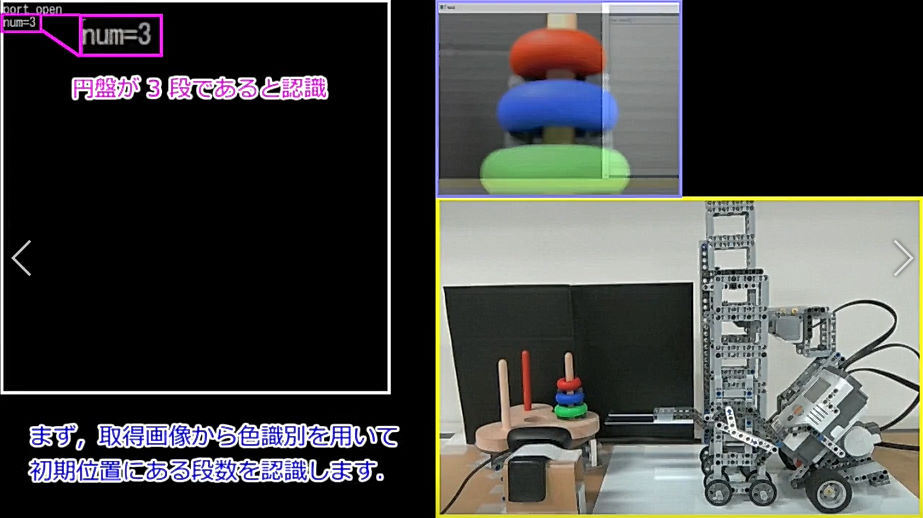
「ハノイの塔」の攻略 |
モーションキャプチャを用いた |
ロボットによる 商品の袋詰め作業支援システム |
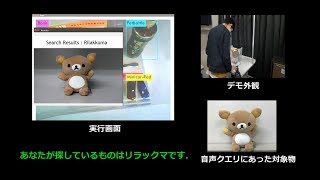
音声認識とYOLOを用いた 商品探索システムの開発 |
 |
 |
 |
 |
| 色識別を用いた小型ロボットMindStormの自動制御により,「ハノイの塔」というパズルゲームをクリアした. |
モーションキャプチャを用いて,人間の運転動作情報を取得し,これに基づいて自動車を遠隔操作するシステムを開発しました. |
形や色情報から商品を認識し,ロボットアームJACOを自動制御することにより,商品の袋詰め作業をおこなうシステムを開発しました. | 音声認識システムにより,ほしい商品の特徴を音声で認識し,YOLOにより,特徴に合った商品を探索するシステムを開発しました. |
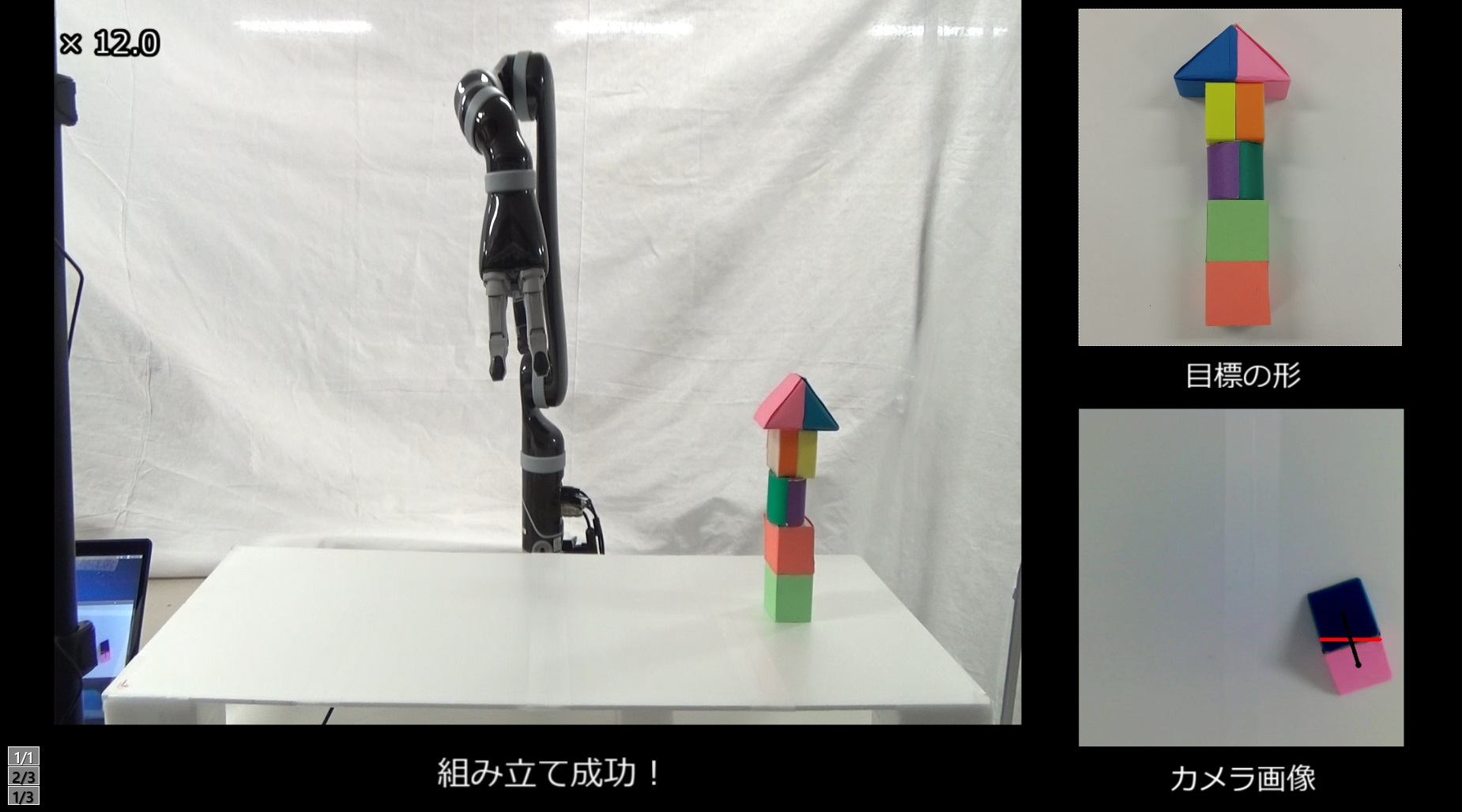
| ROSを用いた ロボット制御による積み木の 自動組み立てシステム |
SRGANを用いた 動画像の高解像度化 |
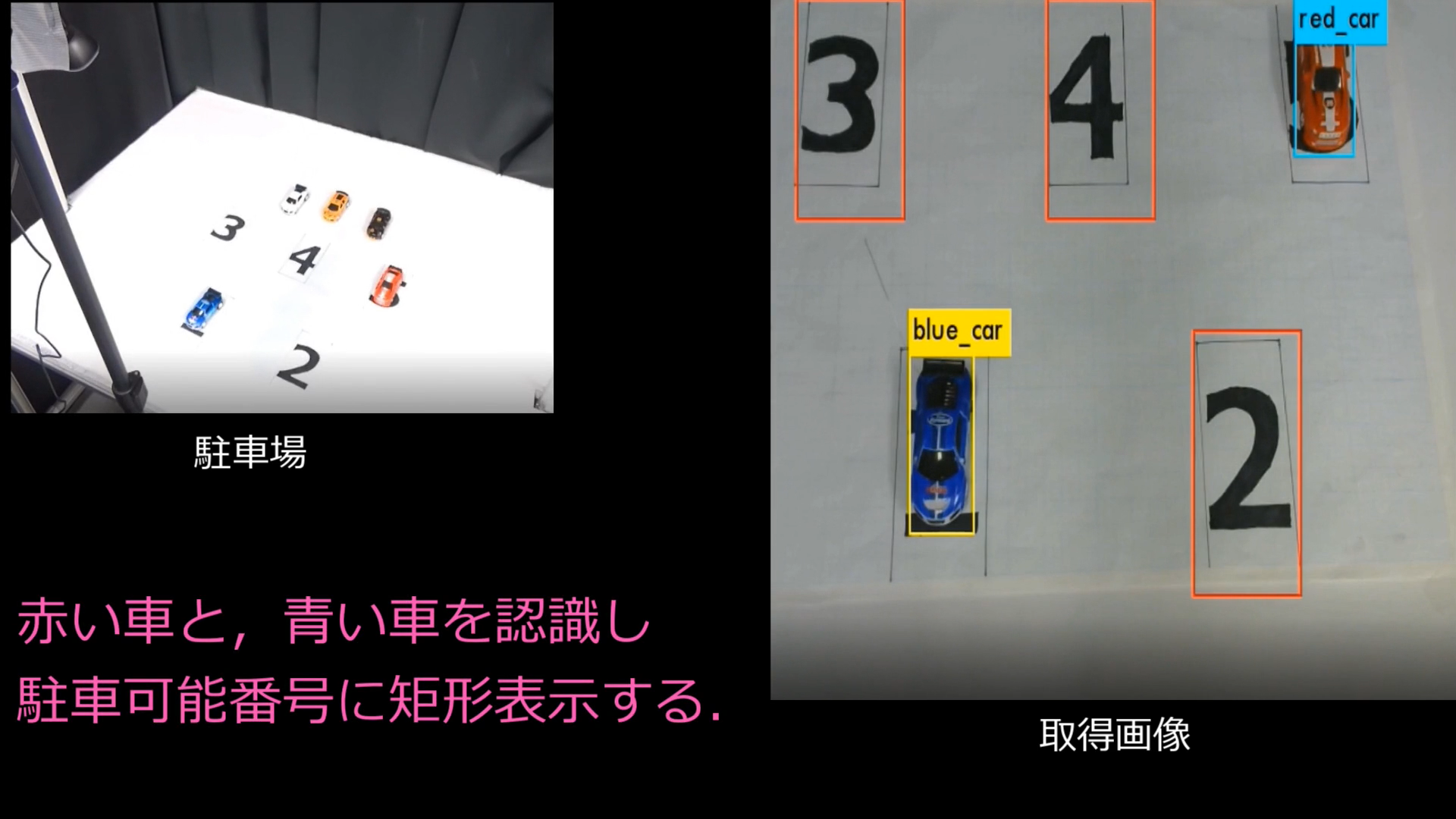
駐車場の空きスペース通知システム | DCGANによる画像生成を用いた 真贋判定ゲームの開発 |
 |
 |
 |
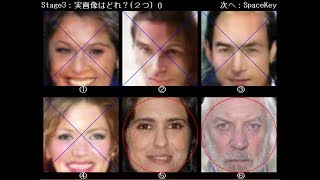 |
| ROSを用いてロボットアームを制御し,ランダムで置かれた4つの積み木を自動で組み立てるシステムを開発しました. | DeepLearning(SRGAN)を用いて動画像の高解像度化をおこない,元の低解像度の動画像と比較することによって効果を確認しました. | DeepLearningを用いて,駐車場の駐車可能位置と駐車した車の種類と位置を検出し通知するシステムを開発しました. | DCGANにより生成された画像がどれほど自然であるかを確認するために真贋判定ゲームを開発しました. |
2016年度
| 自動ピッキング クレーンゲーム |
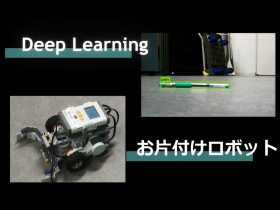
YOLOによる 物体認識を用いた全自動お片付け ロボットの開発 |
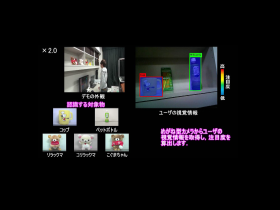
DeepLearningを用いた 物体認識による 注目物体通知システムの開発 |
対話知能を搭載した ロボットモデルの音声操作デモ |
 |
 |
 |
 |
| 画像処理によって認識した対象物を自動でピッキングするクレーンゲームを制作しました. | 車載カメラ画像に対してYOLOを用いることで対象物を認識し,NXTが全自動でお片付けをおこなうロボットを開発しました. | DeepLearningを用いて,めがね型カメラから取得した画像中に存在する対象物を検出し,注目度が最も高いものを通知するシステムを開発しました. | 音声で対象物を指定し,シミュレータ内のロボットアームが指定された対象物をピッキングするシステムを制作しました. |
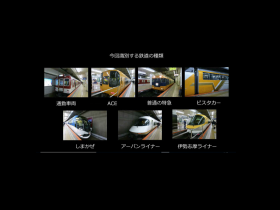
| DeepLearningを用いた 鉄道車両の識別 |
YOLOによる リアル物体認識と連携した ROS環境下での ロボットシミュレータ |
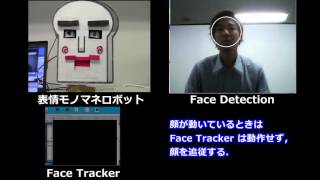
人の表情をまねする ロボットの開発 |
LeapMotionを用いた |
 |
 |
 |
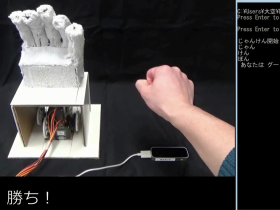 |
| DeepLearningを用いて近鉄名古屋駅に発着する鉄道全7種類を自動で識別するシステムを制作しました. | YOLOにより認識した対象物を,ROS環境下のロボットシミュレータで把持するデモを制作しました. | 人の6表情(驚き,悲しみ,怒り,嫌悪,恐れ)をまねするロボットを制作しました. | LeapMotionを用いて人の手の形を認識し,じゃんけんで必ず勝つロボットを制作しました. |
2015年度
| 人間の表情を真似する 顔ロボットの開発 |
自動お片付けロボット | 6DoFロボットアームによる 対象物の自動ピッキング |
ターンテーブル制御と Kinectを用いた 3D対象物の 全周囲スキャナの開発 |
 |
 |
 |
 |
| 人間の「喜び」「悲しみ」「驚き」「怒り」の4種の表情を画像認識し,それらを真似する顔ロボットを制作いたしました. | 障害物を回避しながら,ボールを色によって分別する「自動お片付けロボット」を制作しました. | 画像処理により認識した対象物をピッキングする物流用途を想定したロボットシステムを制作しました. | 自動制御されたターンテーブル上の物体に対してKinectで取得した他視点の3Dデータをもとに全周囲モデルを生成するシステムを開発した. |
| 小型走行ロボットを用いた 人間との対戦デモ |
小型ロボット LEGO-Mindstormを用いた 全自動すごろくシステム |
ロボットの 旗揚げ動作を利用した 遠隔メッセージ通信 |
簡便な ロボット操縦システムと そのボール運搬への応用 |
 |
 |
 |
 |
| PCが制御する砲台型ロボットと,人間が制御する砲台型ロボットが弾を撃ち合って対戦するデモシステムを実現しました. | サイコロの目を自動的に画像認識し,出た目のマス分だけロボットが進むすごろくゲームを制作しました. | ユーザが指定した文字列をコード化してロボットの旗揚げ動作で表現し,それを画像処理して文字列を復元するシステムを開発しました. | 天井とロボットに取り付けられたWebカメラの視点を適応的に切り替えることによって効率よく対象物(ボール)を運搬するロボットを制作しました. |
2014年度
|
新型Mindstorm(EV3)を用いた自動走行 |
簡易ロボットアームMR-999の自動制御化 |
新型Mindstorm(EV3)を用いた自動走行ロボット | Kinectを用いた 3D独自キャラクタ制作 |
 |
 |
 |
 |
| EV3による2つのコースを自動走行するロボットと,複数の障害物がある環境上の自動制御を実現しました. |
手動で制御するロボットアームをカメラで取得された画像をもとにPCで自動制御できるように改造した. |
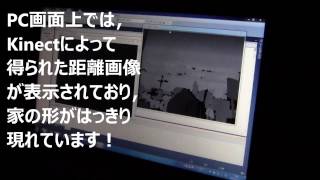
EV3による走行するロボットにカメラを接続し,カメラから得られた情報をもとに自動走行するロボットを作成した. | Kinectを用いて顔データをセンシングし,PCLの関数を用いて点群データを処理し,3Dプリンタによって独自キャラクタを出力した. |
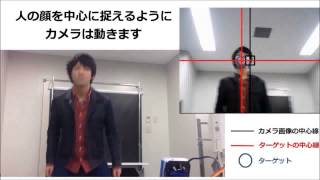
| サーボモータを用いた パンチルトカメラの 自動制御 |
ヒューマンビジョンコンポの 表情認識機能による 演奏アプリの開発 |
複数カメラを用いた |
 |
 |
 |
|
人の顔を検出し,常に画面の中心に捉え続け,写真を撮影するカメラを制作しました. |
HVG-Cを用いて表情を認識することにより,表情に対応した音楽を流す携帯端末のアプリを作成しました. |
アラウンドビューモニターを作成し,このモニターによってラジコンカーを操作し,縦列駐車します. |
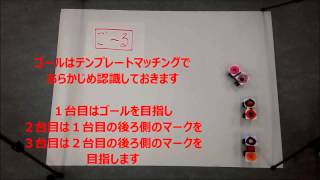
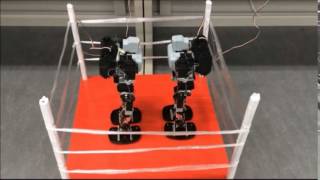
| ラジコンカーの自動制御によるプラトーン走行 | Leap Motionを用いた シューティングゲームの開発 |
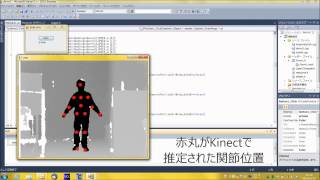
Kinectのジェスチャー 認識を用いたものまね ロボットによるボクシング |
 |
 |
 |
|
ラジコンカーに設置したマーカーを検出し,自動でラジコンカーを制御し,プラトーン走行します. |
Leap Motionを利用して指先座標を取得し,その座標を用いたシューティングゲームを開発しました. |
Kinectで人のジェスチャーを認識し,ロボットが人の動きをまねし,ボクシングする. |
2013年度
|
Kinectセンサを用いた |
平面動物体に対する |
Kinectを用いた 体感型ブロック崩しゲーム |
Webカメラを用いた メガローバーの制御による自動追尾走行 |
 |
 |
 |
 |
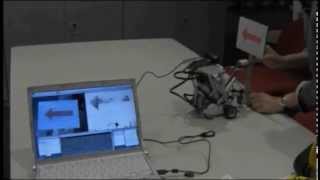
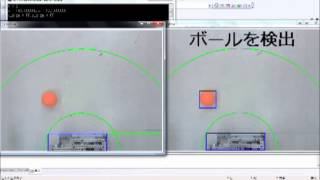
| 人間の手足のジェスチャーを使って認識し,人間型ロボットに同じ動作をさせてみました. | Kinectを用いて平面平面物体(建築物と歩行者)を認識し,適応的に合成画像を投影できました. | 人間のジェスチャーを認識して,ブロック崩しゲームを体感的に操作するプログラムを開発しました. | 台車型ロボットにPCと小型カメラを搭載し,色認識に基づく歩行者追尾を実現した. |
|
Kinectセンサを用いた |
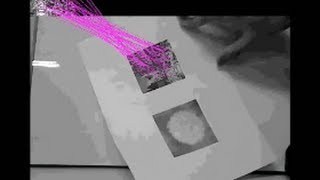
プロジェクタとターンテーブルを用いた光切断による |
Kinectを用いた 人間の動作認識による MindStorm制御 |
Androidを用いた 顔認証 |
 |
 |
 |
 |
| 台車型ロボットにPCと距離センサを搭載し,いま流行の自動走行を実現した. | 光切断の原理を用いて,ターンテーブル上の3次元物体を計測し,全周囲モデルを生成しました. | 人間の動きやジェスチャーを認識して,小型ラジコン自動車を自由自在に制御するゲームを開発しました. | カメラ映像からの顔検出および登録した特定の顔の認識プログラムを,Android端末に実装しました. |
| Mindstormsを用いた 安全自動車(ASV)の開発 |
RaspberryPiによる 移動物体検出 |
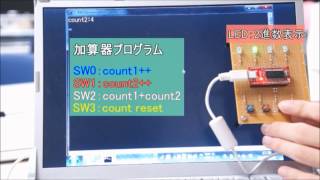
Gainer miniを用いた 外部電子回路制御実験 【押しボタン式加算器】 |
Gainer miniを用いた 外部電子回路制御実験 【ワンタッチ画像処理】 |
 |
 |
 |
 |
| LEGO MinadstormsにKinectセンサを搭載し,障害物や歩行者を認識して安全な走行を実現しました. | 超小型PCである”ラズベリーパイ”にカメラを接続し,移動ブツの検出と記録を実現しました. | Gainer miniで回路を制御し,加算器の動作をするプログラムを製作しました. | Gainer miniで回路を制御し,スイッチのON/OFFで画像処理するプログラムを作成しました. |
2012年度
| LEGO Mindstormsによる ボール運び |
LEGO Mindstormによる 2次元マーク認識 |
道路標識認識による LEGO Mindstormsの自律走行 |
 |
 |
 |
|
LEGO Mindstorms上のカメラ映像をBluetooth経由でPCに転送し,ボールの自動認識と運搬を実現した. |
LEGO Mindstormsにカメラを搭載し,矢印(→)の方向を認識するVisualFeedback走行者を試作しました. |
LEGO Mindstormsを用いて道路標識を認識し,標識に従って自律走行します. |
| MELFAハンドアイによる 構造物自動組み立て |
ペッパーズゴースト錯視を用いた 3次元Viewer |
PCによるビュートローバーのモータ制御 |
 |
 |
 |
|
ロボットアームMELFAに搭載したカメラで設計写真を認識し,積み木をピッキングして構造物を組み立てる. |
ペッパーズゴースト錯視の原理を応用して,アクリル板ピラミット内に3次元物体のアニメーションを作成した. |
PCで生成したモータ制御データをBluetooth経由でVstone Beauto Roverに転送し,走行制御します. |
2011年度
| LEGO Mindstormによる アームロボットの開発と制御 |
LEGO Mindstormによる 顔の自動追尾 |
MELFAハンドアイによる 3種類の円柱識別&挿入 |
 |
 |
 |
|
LEGO Mindstormsを用いた全自動クリケットロボットを開発しました. |
LEGO Mindstormsに搭載したカメラ映像をBluetooth経由でPCに転送し,顔の追跡を実現しました. |
ロボットアームMELFAのハンドアイで円柱と円孔を認識し,3点レーザ測距により斜め挿入を実現しました. |
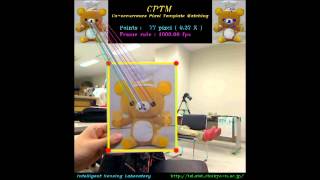
| 視線検出による関心度測定 | CPTMを用いた 超高速カメラぶれ補正 |
ODEを用いた リアルなロボットアームの実現とシミュレーション |
 |
 |
 |
|
ユーザの視線を検出し,連続注視時間による関心度評価グラフを表示します. |
高速テンプレートマッチング(CPTM)を用いた同画像のぶれ補正を実現しました. |
ODE(Open Dynamic Engine)を用いたロボットアームMELFAの動作シミュレータを作成しました. |
2010年度
| 外部監視カメラを用いた ラジコン制御 |
Kinectを用いた Z-Keyによる事前撮影映像との リアルタイムスーパーインポーズ |
Kinectを用いたFoot Piano | Kinectを用いた未来の楽器 |
 |
 |
 |
 |
| 障害物に囲まれたラジコンカーを上空から撮影して位置と姿勢を認識し,自動制御で目的地に走行します. |
Kinectで撮影して人体領域を抽出し,リアルタイムでカメラ映像と合成します. |
Kinectを用いて足先の位置を検出し,踏んだ鍵盤の音を鳴らすFoot Pianoです. | Kinectで手のジェスチャーを認識し,ビープ音源の周波数やビブラートを変化させる. |
| Kinectを用いた ロボットアームMELFAの ジェスチャー操作 |
BoFを用いた自動カロリー計算 |
缶飲料図柄の識別 | BoFを用いたスイーツの自動分類 |
 |
 |
 |
 |
| Kinectで認識した手のジェスチャーをもとに,ロボットアームMELFAを制御するテレオペレーションを試作しました. |
ラーメン・カレー・カツ丼の3種の学食メニューを認識し,カロリーを表示する. |
Webカメラの映像から手に持った缶を自動検出し,缶ビールの銘柄を識別します. | BoF(Bug of Feature)を使って5種類のスイーツを識別するプログラムを制作した. |
2009年度
| 小型ロボットiSOBOTによる ボール発見と追跡 |
4ビットマイコンを用いた 外部接続LED表示制御 |
ロボットアームとLED制御による 画像データベース自動構築システム |
エンコーダレスロボットアームの ビジュアルフィードバック制御 |
 |
 |
 |
 |
| iSOBOTに搭載したカメラでボールを搭載したカメラでボールを探索し,追跡するビジュアルフィードバックを実現しました. | 4ビットマイコン(「大人の科学」付録)を改造して,外部接続LEDを表示させた. | ロボットアームにLEDライトを装着し,約1000パターンの照明条件の画像を自動取得します. | アーム型の玩具ロボットMR-999を改造して,PCから制御できるようにしてみた. |
| SIFTアルゴリズムの Cygwinでの動画処理 |
TOFセンサによる ジャンケン認識システム |
2カメラによる視差動画像の 自動生成と簡易立体表示 |
倒立振子に関する理論と実装 |
 |
 |
 |
 |
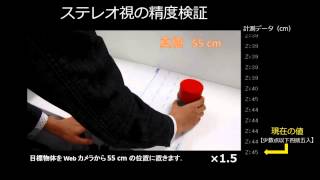
| キーポイント型物体検出の代表的手法であるSIFTアルゴリズムを動画像に適用してみました. | TOFセンサを用いて,人間のじゃんけんの手を認識するシステムを開発しました. | 2台のWEBカメラを使用してアナグリフ式の視差動画像を作成しました. | ビュートバランサーのモータ出力値を調整して,倒立振子を安定に動かしています. |
Copyright(C)2010 – Hashimoto Lab., All rights reserved